 Get in touch
Get in touch

1. Johdanto: AC-oikosulkumoottorin hevosvoiman purkaminen AC induktiomoottori on yksi m...
LUE LISÄÄ2025-09-23
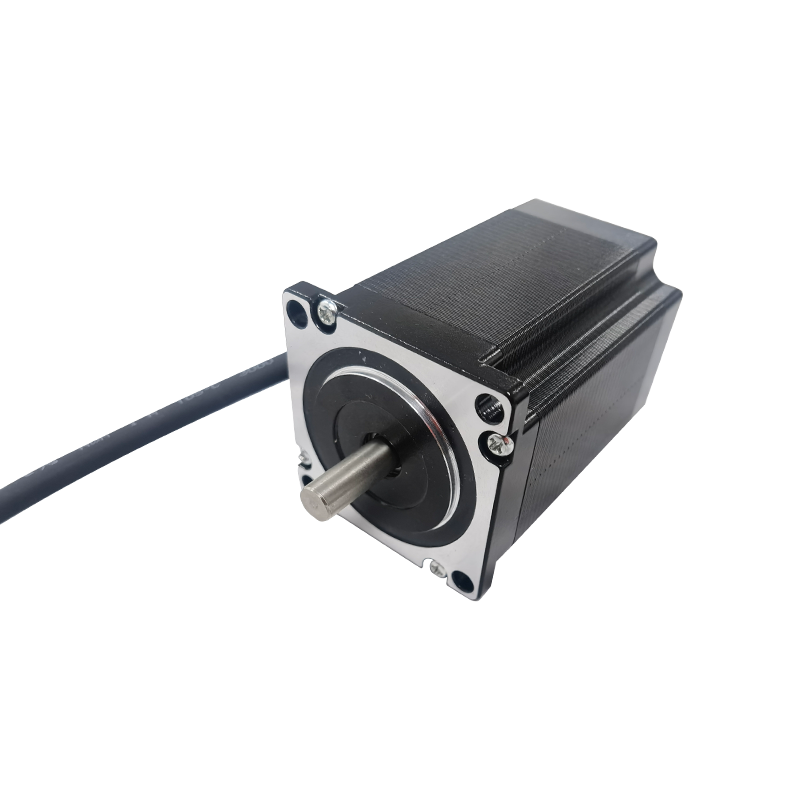
Askelmoottorit edustavat modernin liikkeenohjauksen kulmakiviä, jotka tarjoavat tarkan paikantamisen ja toistettavuuden ilman monimutkaisia palautejärjestelmiä. Nämä harjattomat, synkroniset sähkömoottorit muuttavat digitaaliset pulssit tarkiksi mekaanisiksi akselin kierroksiksi, jotka liikkuvat erillisissä vaiheissa. Tämä ominaisuus tekee niistä välttämättömiä sovelluksissa kulutuselektroniikasta kehittyneisiin teollisuuskoneisiin. Kuitenkin, kun sovellukset vaativat tarkkuuden lisäksi myös merkittävää voimaa raskaiden kuormien siirtämiseen, kitkan voittamiseksi tai asennon säilyttämiseksi rasituksessa, tavallinen askelmoottori saattaa osoittautua riittämättömäksi. Tässä on luokka suuren vääntömomentin askelmoottorit tulee kriittiseksi.
Askelmoottoreiden yhteydessä 'korkealla vääntömomentilla' tarkoitetaan moottorin kykyä tuottaa ylivoimainen pyörimisvoima verrattuna stjaardimoottoreihin, joilla on samanlainen fyysinen koko tai runko. Vääntömomentti on moottorin voiman perusmitta, joka määrää, kuinka paljon kuormaa se voi kiihdyttää, ajaa ja pitää paikallaan. Suuren vääntömomentin merkitystä ei voi liioitella vaativissa sovelluksissa. Esimerkiksi robotiikassa suuri vääntömomentti on välttämätöntä niveltoimilaitteille, joiden on kestettävä robottikäden paino ja sen hyötykuorma. CNC-työstössä se varmistaa, että leikkuutyökalu voi liikkua tarkasti materiaalin läpi pysähtymättä. Pohjimmiltaan suuren vääntömomentin askelmoottorit täyttävät eron tarkan tarkkuuden ja huomattavan mekaanisen tehon vaatimuksen välillä , mahdollistaa innovaatiot aloilla, jotka vaativat molempia.
Jotta voidaan täysin ymmärtää suuren vääntömomentin askelmoottoreiden etuja, on ensin ymmärrettävä kaikkia askelmoottoreita koskevat perusperiaatteet. Toisin kuin tavalliset tasavirtamoottorit, jotka pyörivät jatkuvasti jännitteen ollessa päällä, askelmoottori liikkuu kiintein kulma-askelin, joka tunnetaan portaina. Moottorin sisäinen rakenne koostuu kiinteästä osasta (staattori), jossa on useita sähkömagneettisia keloja, ja pyörivästä osasta (roottori), joka sisältää tyypillisesti kestomagneetteja tai magneettisesti läpäisevän sydämen. Aktivoimalla staattorin käämit tietyssä järjestyksessä, syntyy magneettikenttä, joka vetää puoleensa roottoria ja saa sen kohdakkain kentän kanssa ja siten pyörimään tarkan kulman jokaisen ohjaimelta vastaanotetun pulssin kanssa.
Askelmoottoreita on useita perustyyppejä, joista jokaisella on omat toimintaominaisuudet. Kestomagneetti (PM) askelmoottorit niissä on kestomagneeteilla varustettu roottori, joka tarjoaa hyvän pitomomentin ja suhteellisen suuren askelkulman, mutta ne tarjoavat usein pienemmän resoluution ja vääntömomentin muihin tyyppeihin verrattuna. Variable Reluktance (VR) askelmoottorit niissä on pehmeä rautainen roottori, joka kohdistuu pienimmän reluktanssin (magneettisen vastuksen) magneettikentän polun kanssa; nämä ovat nykyään harvinaisempia. Yleisin tyyppi, erityisesti korkean suorituskyvyn sovelluksissa, on Hybridi askelmoottori . Tämä rakenne yhdistää sekä PM- että VR-moottorien periaatteet hyödyntäen kestomagneettiroottoria, jonka hampaat ovat vuorovaikutuksessa hammastetun sähkömagneettisen staattorin kanssa. Tämä hybridikokoonpano mahdollistaa erittäin pienet askelkulmat, suuren vääntömomentin ja erinomaisen paikannustarkkuuden, joten se on hallitseva malli korkean vääntömomentin askelmoottori sovelluksia.
Useat keskeiset termit ovat välttämättömiä askelmoottorin teknisten tietojen ymmärtämiseksi. The askelkulma määrittää kulmaetäisyyden, jonka akseli pyörii jokaisella pulssilla, tavallisesti 1,8° (200 askelta/kierros) tai 0,9° (400 askelta/kierros) hybridimoottoreissa. Pitomomentti on suurin vääntömomentti, jonka moottori voi kohdistaa ollessaan paikallaan ja sen käämit ovat jännitteisiä, mikä on kriittinen arvo korkean vääntömomentin askelmoottori koska se osoittaa sen kykyä pitää asemansa ulkoista voimaa vastaan. päinvastoin, pidättävä vääntömomentti on kestomagneettiroottorin ja staattorin välisen magneettisen vuorovaikutuksen aiheuttama vääntömomentti, joka on olemassa, kun moottorin käämeissä ei ole virtaa; tämä tarjoaa pienen passiivisen pitovoiman.
Mekaanisesti vääntömomentti on kappaleeseen kohdistetun pyörimisvoiman mitta. Askelmoottorissa se on pyörimisvoima, jonka moottorin akseli voi tuottaa liikkeen aiheuttamiseksi tai vastustamiseksi. Se on analoginen voiman käsitteen kanssa lineaarisessa järjestelmässä. Siksi suuri vääntömomentti tarkoittaa moottorin kykyä tuottaa vahvaa pyörimisvoimaa. Tämä on ensiarvoisen tärkeää sovelluksissa, joihin liittyy raskaiden kuormien kiihdyttäminen, suuren kitkan käyttömekanismit tai tarkan asennon ylläpitäminen jatkuvassa ulkoisessa paineessa. On tärkeää erottaa, että a korkean vääntömomentin askelmoottori ei välttämättä ole erilainen moottoriluokka, vaan pikemminkin nimitys askelmoottoreille, jotka on suunniteltu tuottamaan vääntömomenttiarvoja huomattavasti runkokoonsa vakioperustason yläpuolella.
Vääntömomentti askelmoottoreissa mitataan tyypillisesti newtonmetreinä (N·m) tai unssituumina (oz-in). Tärkein moottorin tiedoissa oleva vääntömomenttitieto on pitämällä vääntömomenttia . Tämä on suurin vääntömomentti, jonka moottori voi tuottaa pysähdyksissä, kun sen kelat ovat täysin jännitteisiä. Se toimii ensisijaisena moottorin voimakkuuden indikaattorina. Toinen tärkeä esitys on vääntömomenttikäyrä , kaavio, joka esittää moottorin käytettävissä olevan vääntömomentin sen pyörimisnopeuden funktiona. Tämä käyrä on elintärkeä, koska askelmoottorin vääntömomentti pienenee sen nopeuden kasvaessa induktanssin ja taka-EMF:n vaikutuksesta. Ymmärtäminen askelmoottorin nopeus vs vääntömomentti Suhde on olennainen sellaisen moottorin valinnassa, joka toimii riittävästi sovelluksen koko vaaditulla toiminta-alueella ja varmistaa, että se ei pysähdy suuremmilla nopeuksilla.
Askelmoottorin vääntömomentti ei ole kiinteä arvo; siihen vaikuttavat useat toiminnalliset ja suunnittelutekijät. Moottorin käämeihin syötetty virta on ensisijainen ohjain; suurempi virta johtaa yleensä voimakkaampaan magneettikenttään ja siten suurempaan vääntömomenttiin moottorin suunnittelurajoihin saakka. Myös syöttöjännitteellä on kriittinen rooli, erityisesti suuremmilla nopeuksilla. Korkeampi jännite mahdollistaa virran vaihtamisen suunnan moottorin käämeissä nopeammin, mikä auttaa ylläpitämään vääntömomenttia kasvaneilla pyörimisnopeuksilla. Moottorin fyysinen rakenne, mukaan lukien sen magneettisten materiaalien laatu, staattorin hampaiden lukumäärä sekä roottorin ja staattorin välinen ilmarako, on kaikki suunniteltu maksimoimaan vääntömomentin tuotto. Esimerkiksi a NEMA 23 suuren vääntömomentin askelmoottori suunnitellaan siten, että nämä tekijät on optimoitu tuottamaan enemmän vääntömomenttia kuin tavallinen NEMA 23 -moottori.
Ensisijainen etu käyttää a korkean vääntömomentin askelmoottori on liikkeenohjaustehtäviin käytettävissä olevan mekaanisen tehon merkittävä lisäys. Tämä parannettu ominaisuus merkitsee useita keskeisiä etuja, jotka ovat kriittisiä vaativien sovellusten onnistumisen kannalta. Selvin hyöty on kyky käsitellä suurempia inertiakuormia ja voittaa huomattavan kitkan. CNC-reitittimien tai automatisoitujen kuljetinhihnojen kaltaisissa järjestelmissä moottorin ei tarvitse ainoastaan siirtää työkalupäätä tai hihnaa, vaan myös kiihdyttää ja hidastaa massaa nopeasti. Moottori, jonka vääntömomentti on riittämätön, pysähtyisi tai menettäisi askeleita tällaisissa vaatimuksissa, kun taas a korkean vääntömomentin askelmoottori tarjoaa tarvittavan voiman luotettavan toiminnan varmistamiseksi, mikä laajentaa mahdollisten sovellusten valikoimaa ja parantaa olemassa olevien järjestelmien kestävyyttä.
Parempi tarkkuus ja merkittävä sijaintivirheiden väheneminen ovat toinen suuri etu. Korkea pitämällä vääntömomenttia Näiden moottoreiden ominaisuuden ansiosta ne voivat säilyttää asemansa jäykästi odottamattomia ulkoisia voimia tai tärinää vastaan. Tämä on ratkaisevan tärkeää sovelluksissa, kuten tarkkuuskokoonpanossa tai lääketieteellisten laitteiden sijoittelussa, joissa pienikin poikkeama voi johtaa epäonnistumiseen. Lisäksi huomattava vääntömomenttireservi auttaa estämään jumiutumisen, joka on yleinen syy askelten katoamiseen. Kadonneita vaiheita tapahtuu, kun moottori ei suorita käskettyä liikettä, mikä johtaa kasautuvaan sijaintivirheeseen, jota avoimen silmukan järjestelmä ei pysty havaitsemaan. Toimimalla hyvin vääntökapasiteetin rajoissa a korkean vääntömomentin askelmoottori minimoi tämän riskin suuresti varmistaen, että koneen todellinen asento vastaa aina ohjaimen määräämää aiottua asentoa.
Lopuksi nämä moottorit tarjoavat enemmän suunnittelun joustavuutta ja pitkäikäisyyttä. Insinöörejä ei pakoteta ajamaan moottoria käyttörajoihinsa, mikä usein johtaa ylikuumenemiseen ja lyhentyneeseen käyttöikään. Sen sijaan he voivat valita a korkean vääntömomentin askelmoottori joka toimii tehokkaasti ja viileästi suorituskyvyn sisällä. Tämän korkeuden ansiosta järjestelmät voivat myös käsitellä muuttuvia kuormia tai odottamattomia esteitä sulavammin ilman katastrofaalisia vikoja. Mahdollisuus käyttää kompaktimpaa moottorirunkoa, kuten a NEMA 23 suuren vääntömomentin askelmoottori , jotta saavutetaan suorituskyky, joka muutoin vaatisi suurempaa ja hankalampaa runkoa, on tämän tekniikan suora etu, mikä mahdollistaa virtaviivaisemman ja tehokkaamman mekaanisen suunnittelun.
Ainutlaatuinen yhdistelmä tarkkuutta, luotettavuutta ja tehoa tekee korkean vääntömomentin askelmoottoris sopii monenlaisiin sovelluksiin useilla teollisuudenaloilla. Niiden kyky tarjota ohjattua liikettä erillisissä vaiheissa ilman palauteantureita yksinkertaistaa järjestelmän suunnittelua ja varmistaa samalla tarkkuuden.
Alalla Robotiikka , nämä moottorit ovat valinnanvaraisia toimilaitteita nivelten liikkumiseen, erityisesti sisään robotin kädet joiden on kestettävä raskaita hyötykuormia. The korkean vääntömomentin askelmoottori for robotics tarjoaa tarvittavan voiman raajojen ja tarttujien niveltämiseen tarkasti samalla kun se tukee käsivarren ja sen kantaman esineen painoa. Tämä on välttämätöntä tehtävissä teollisesta kokoonpanosta ja hitsauksesta monimutkaiseen laboratorioautomaatioon. The pitämällä vääntömomenttia varmistaa, että käsivarsi pysyy asennossaan ajautumatta, vaikka se olisi päällä, mutta ei liikkeessä.
CNC-koneet edustavat klassista sovellusta, jossa tarkkuudesta ja tehosta ei voi neuvotella. A askelmoottori CNC-reitittimeen sovellusten on siirrettävä leikkuutyökalua materiaalien, kuten metallin, puun tai muovin, läpi, jotka kohtaavat merkittävää vastusta. The korkean vääntömomentin askelmoottori varmistaa, että työstörataa seurataan tarkasti ilman pysähtymistä, mikä vahingoittaisi työkappaletta ja mahdollisesti vahingoittaisi konetta. Samat periaatteet koskevat muita CNC-laitteita, kuten sorveja, plasmaleikkureita ja laserleikkureita, joissa tasainen suorituskyky on kriittistä laadun ja tuottavuuden kannalta.
Maailman 3D-tulostus luottaa suuresti askelmoottoreihin sekä akselin liikkeessä että filamentin suulakepuristuksessa. Kun tulostimien koko ja nopeus kasvavat ja materiaalit, kuten ABS ja nailon, vaativat enemmän voimaa puristaakseen ekstruuderin läpi, vääntömomentin tarve kasvaa. A askelmoottori 3D-tulostimille korkea vääntömomentti varmistaa tarkan kerrosten kohdistuksen estämällä vaiheiden puuttumisen X-, Y- ja Z-akseleilla, kun taas suuren vääntömomentin ekstruuderin moottori tarjoaa tasaisen filamentin virtauksen, mikä parantaa tulostuslaatua ja luotettavuutta.
Teollisuusautomaatio on laaja alue, jossa nämä moottorit ovat kaikkialla. He ajavat kuljetinjärjestelmiä sisään pakkauskoneet , käytä venttiilejä ja aseta komponentit sisään pick & place koneet . Näissä ympäristöissä kestävyys ja jatkuva toiminta ovat ensiarvoisen tärkeitä. An teollinen suuren vääntömomentin askelmoottori varmistaa pitkän aikavälin luotettavuuden ja kyvyn suorittaa toistuvia tehtäviä suurella tarkkuudella miljoonia kertoja. Ankarissa ympäristöissä vaihtoehtoja, kuten an IP65 korkean vääntömomentin askelmoottori tai jopa an IP67-luokiteltu ulkokäyttöinen askelmoottori ovat saatavilla estämään pölyn ja kosteuden sisäänpääsyä.
Lääketieteelliset laitteet vaatii korkeinta tarkkuutta, puhtautta ja luotettavuutta. Suuren vääntömomentin askelmoottorit käytetään laitteissa, kuten automatisoiduissa analysaattoreissa, infuusiopumpuissa, kirurgisissa roboteissa ja kuvantamislaitteissa. Niiden tarkka liike ohjaa näytteen käsittelyä, annostelua sekä anturien ja työkalujen sijoittelua. Monissa tapauksissa a hiljainen askelmoottori laboratorioautomaatioon tai lääketieteellinen käyttö on määritelty hiljaisen käyttöympäristön varmistamiseksi. Askelmoottorin toiminnan ennakoitavissa oleva luonne yhdistettynä korkeaan vääntömomenttiin tekee niistä ihanteellisia näihin herkkiin sovelluksiin.
Näiden lisäksi erikoissovelluksia syntyy jatkuvasti. Niitä käytetään mm autojen toimilaitteet peilin säätöön ja kaasun säätöön, sisään painokoneet Tarkkaa paperinsyöttöä varten ja uusiutuvan energian järjestelmissä, kuten aurinkoseurannan askelmoottori korkea vääntömomentti yksiköt, jotka säätävät paneelit seuraamaan aurinkoa ja sisään tuuliturbiinin nousun säätö mekanismeja.
Valitse sopiva korkean vääntömomentin askelmoottori tietylle sovellukselle edellyttää useiden avainparametrien systemaattista arviointia. Väärä valinta voi johtaa huonoon suorituskykyyn, moottorin pysähtymiseen, ylikuumenemiseen tai ennenaikaiseen vikaan.
Kriittisin vaihe on sovelluksen vääntömomenttivaatimusten tarkka määrittäminen. Tämä sisältää vääntömomentin laskemisen, joka tarvitaan kuorman hitauden kiihdyttämiseen ja jatkuvien voimien, kuten kitkan tai painovoiman, voittamiseksi. Moottorin on tarjottava vääntömomentti, joka ylittää sovelluksen vaatiman huippuvääntömomentin koko käyttönopeusalueella, sellaisena kuin se on määritelty askelmoottorin nopeus vs vääntömomentti käyrä. Paras käytäntö on sisällyttää turvamarginaali 30–50 % lasketun vaatimuksen yläpuolelle, jotta voidaan ottaa huomioon odottamattomat muuttujat, kuten kitkan muutokset tai valmistustoleranssit. Konsultointi a askelmoottorin vääntömomenttikaavio ehdokasmoottorille on välttämätöntä varmistaa, että sen vääntömomenttikäyrä vastaa sovelluksen vaatimuksia sekä pienillä että suurilla nopeuksilla.
Moottorin fyysinen koko, usein standardoitu NEMA kehyskoot (esim. NEMA 17, NEMA 23, NEMA 34) antaa yleisen osoituksen sen tehokapasiteetista. A NEMA 23 suuren vääntömomentin askelmoottori tuottaa tyypillisesti enemmän vääntömomenttia kuin NEMA 17 -moottori, kun taas a isorunkoinen askelmoottori Kuten NEMA 34, pystyy vieläkin suurempiin vääntömomentteihin. Kehyksen koko ei kuitenkaan yksinään ole täydellinen indikaattori; Sisäinen muotoilu ja materiaalien laatu vaikuttavat suuresti todelliseen vääntömomenttiin. Valinnan tulee tasapainottaa vääntömomenttitarve koneen sisällä olevan tilan ja asennusrajoitusten kanssa.
Moottorin sähköisten tietojen sovittaminen kuljettajaan ja virtalähteeseen on ratkaisevan tärkeää nimellissuorituskyvyn saavuttamiseksi. Moottorin nykyinen luokitus on suurin vaihekohtainen virta, jonka se pystyy käsittelemään ilman ylikuumenemista. Kuljettajan on kyettävä välittämään tämä virta. Tarjonta jännite on yhtä tärkeä. Korkeampi jännite mahdollistaa virran nopean nousun moottorin käämeissä, mikä on välttämätöntä vääntömomentin ylläpitämiseksi suuremmilla nopeuksilla. Moottorin käyttäminen liian alhaisella jännitteellä olevalla virtalähteellä johtaa vääntömomentin nopeaan pudotukseen nopeuden kasvaessa, mikä näkyy selvästi moottorin vääntömomenttikäyrässä.
The askelkulma määrittää moottorin ominaisresoluution. Tavallinen 1,8 asteen moottori tarjoaa 200 askelta kierrosta kohti, kun taas 0,9 asteen moottori tarjoaa 400 askelta. Sovelluksiin, jotka vaativat erittäin hienoa asennonsäätöä, pienempää askelkulmaa tai kuljettajan käyttöä mikroaskelma on edullinen. On tärkeää muistaa, että vaikka mikroaskelma lisää resoluutiota, se ei lisää merkittävästi tarkkuutta; mikroaskelasennossa tuotettu vääntömomentti on pienempi kuin täyden askeleen asennossa.
Toimintaympäristö tulee huomioida luotettavuuden varmistamiseksi. Sellaiset tekijät kuin ympäristön lämpötila, epäpuhtaudet, kuten pöly tai kosteus, ja altistuminen tärinälle voivat vaikuttaa moottorin valintaan. Esimerkiksi pesuympäristössä tai ulkosovelluksissa, an IP65 korkean vääntömomentin askelmoottori tai suurempi olisi tarpeen vahinkojen estämiseksi. Korkeat ympäristön lämpötilat saattavat edellyttää moottorin alentamista (käytä sen enimmäisvääntömomenttimäärittelyn alapuolella) ylikuumenemisen estämiseksi tai korkeamman lämpötilaluokan moottorin valitsemista.
Valitsemalla tietyn mallin laajasta valikoimasta korkean vääntömomentin askelmoottoris voi olla pelottavaa. Seuraavassa yleiskatsauksessa esitellään valikoima tuotteita, jotka on luokiteltu niiden tyypillisten sovellusvahvuuksien mukaan, korostaen tärkeimpiä ominaisuuksia viittaamatta tiettyihin tuotenimiin. Tämä luettelo havainnollistaa insinöörien ja suunnittelijoiden käytettävissä olevaa monimuotoisuutta.
NEMA 17 High Torque Stepper -moottori: Tämä kompakti moottori on työhevonen sovelluksissa, joissa tilaa on rajoitetusti, mutta suorituskykyä ei voida tinkiä. Se on poikkeuksellisen suosittu high-end 3D-tulostus ja pienimuotoista automaatiota. Nykyaikaiset versiot tarjoavat vääntömomenttiarvoja, jotka kilpailevat suurempien, vanhempien mallien kanssa, joten ne ovat ihanteellisia tarkkuusinstrumentteihin ja kompakteihin robotiikkaa nivelet.
NEMA 23 High Torque Stepper -moottori: Epäilemättä yleisin runkokoko vaativiin työpöytäsovelluksiin, NEMA 23 suuren vääntömomentin askelmoottori tarjoaa erinomaisen tasapainon koon, tehon ja kustannusten välillä. Se on oikea valinta CNC-reitittimet , pienet jyrsinkoneet ja isommat 3D-tulostimet . Sen monipuolisuus tekee siitä sopivan monenlaiseen käyttöön teollisuusautomaatio tehtäviä.
NEMA 34 High Torque Stepper -moottori: Kun tarvitaan huomattavaa tehoa, tämä isorunkoinen askelmoottori on seuraava askel ylöspäin. Se on suunniteltu raskaaseen käyttöön CNC koneet, teollisuuden portaalit ja automaatiojärjestelmät, joiden on siirrettävä merkittäviä kuormia. Nämä moottorit ovat välttämättömiä sovelluksissa, joissa tarvitaan suurta työntövoimaa, kuten suurikokoisissa painokoneet .
Vaihdetettu askelmoottori: Tämä tyyppi yhdistää planeettavaihteiston standardiin hybridi askelmoottori . Vaihteen alennus moninkertaistaa vääntömomentin merkittävästi samalla, kun se laskee ulostulonopeutta, luoden poikkeuksellisen alhainen kierrosluku korkea vääntömomentti moottori . Tämä on ihanteellinen sovelluksiin, kuten kuljetinkäytöt, venttiilitoimilaitteet ja kaikki järjestelmät, jotka vaativat suurta voimaa hitailla, kontrolloiduilla nopeuksilla.
Vedenpitävä askelmoottori (IP65/IP67): Suunniteltu ankariin ympäristöihin, an IP65 korkean vääntömomentin askelmoottori on pölytiivis ja suojattu vesisuihkuilta, joten se sopii elintarvikkeiden ja juomien valmistukseen, pakkauskoneet ja ulkokäyttöön. An IP67-luokiteltu ulkokäyttöinen askelmoottori tarjoaa entistä paremman suojan tilapäistä upotusta vastaan, täydellinen aurinkoseurantalaite järjestelmiä tai maatalouslaitteita.
Suljetun piirin suuren vääntömomentin askelmoottori: Tämä edistynyt järjestelmä yhdistää a korkean vääntömomentin askelmoottori integroidulla kooderilla. Enkooderi antaa reaaliaikaista palautetta erikoistuneelle kuljettajalle, mikä luo a suljettu silmukka järjestelmä, joka voi havaita ja korjata jääneet vaiheet. Tämä tekniikka tarjoaa askelmoottorin yksinkertaisuuden sekä servon luotettavuuden ja nopean suorituskyvyn, mikä on ihanteellinen kriittiseen tehtävään. lääketieteelliset laitteet ja korkean suorituskyvyn pick & place koneet .
Korkean vääntömomentin askelmoottori integroidulla kooderilla ja vaihteistolla: Tämä edustaa pitkälle suunniteltua ratkaisua, joka yhdistää moottorin, vääntömomentin kertovan vaihteiston ja paikannuspalautteen anturin yhdeksi yksiköksi. Tämä moottori integroidulla anturilla ja vaihteistolla yksinkertaistaa suunnittelua ja asennusta monimutkaisiin liiketehtäviin tarjoten suuren vääntömomentin, alhaisen nopeuden ja hallittavuuden kompaktissa paketissa esimerkiksi sovelluksiin robotin kädet and autojen toimilaitteet .
Erittäin tarkka askelmoottori: Nämä moottorit on suunniteltu sovelluksiin, jotka vaativat äärimmäistä tarkkuutta ja sileyttä, kuten sisään lääketieteellinen laite valmistus tai laboratorioautomaatio. Niissä on usein erittäin hienot askelkulmat, ja ne on optimoitu minimaaliseen tärinään ja meluon, mikä on a hiljainen askelmoottori laboratorioautomaatioon .
Sertifioitu askelmoottori säännellyille aloille: Lääketieteellisissä, ilmailu- tai julkisissa laitteissa käytettävät moottorit vaativat usein muodollisen sertifikaatin. A askelmoottori CE / UL / RoHS-sertifikaateilla osoittaa kansainvälisten turvallisuus-, ympäristö- ja sähkömagneettista yhteensopivuutta koskevien standardien noudattamista, mikä on monien edellytys lääketieteellinen laite ja kuluttajille suunnatut sovellukset.
Mukautettu korkean vääntömomentin hybridi askelmoottori: Sovelluksiin, joissa on ainutlaatuisia mekaanisia, sähköisiä tai ympäristörajoituksia, a räätälöity korkean vääntömomentin hybridi askelmoottori voi olla ainoa ratkaisu. Toimittajat voivat muokata vakiomalleja erikoisilla akselin koot , liittimet, käämit, pinnoitteet tai magneettiset materiaalit täyttämään tarkat suorituskyky- ja muototekijävaatimukset.
Nimellissuorituskyvyn saavuttaminen alkaen a korkean vääntömomentin askelmoottori riippuu täysin sen yhdistämisestä oikean käyttöelektroniikkaan. Moottori itsessään on passiivinen laite; ohjain ja virtalähde määräävät, kuinka tehokkaasti se muuntaa sähköenergian mekaaniseksi liikkeeksi.
Askelmoottorin ajurit ovat kriittinen linkki ohjaussignaalin ja moottorin välillä. Ne ottavat pienitehoisia askel- ja suuntapulsseja liikeohjaimesta ja muuntavat ne suureksi virtaksi, joka tarvitaan moottorin käämien ohjaamiseen. varten korkean vääntömomentin askelmoottoris , ohjaintekniikan valinta on ensiarvoisen tärkeää. Perusajurit toimivat täysi- tai puolivaihetilassa, mikä voi riittää joissakin sovelluksissa, mutta johtaa usein havaittavaan tärinään. Microstepping-ajurit ovat erittäin suositeltavia. Ne jakavat elektronisesti jokaisen täyden askeleen pienemmiksi mikroaskeliksi, mikä johtaa huomattavasti tasaisempaan liikkeeseen, vähentäen kuultavissa olevaa melua ja parempaa vakautta hitaalla nopeudella. Kuljettajan kyky tuottaa tasaista virtaa on elintärkeää vääntömomentin ylläpitämiseksi, erityisesti suuremmilla nopeuksilla.
Virtalähteet tulee valita huolella. Virtalähteen jännitteen tulee olla huomattavasti suurempi kuin moottorin nimellisjännite, jotta se voi voittaa nopeudella syntyvän taka-EMF:n. Yleinen nyrkkisääntö on käyttää syöttöjännitettä, joka on 5–20 kertaa moottorin nimellisjännite, kunhan kuljettajan maksimijännitettä ei ylitetä. Virtalähteen tulee myös pystyä toimittamaan moottorin tarvitsema virta. Syöttövirran nimellisarvon (ampeerina) tulee olla vähintään yhtä suuri kuin kaikkien käytettävien moottoreiden vaatiman virran summa, vaikkakin marginaali on suositeltavaa huippukysynnän vuoksi.
Ohjaussignaalit ovat digitaalisia komentoja, jotka sanelevat liikettä. Suurin osa nykyaikaisista stepper-ajureista käyttää yksinkertaista kahden signaalin käyttöliittymää: STEP ja DIRECTION. Jokainen STEP-rivin pulssi käskee moottoria liikkumaan yhden askeleen (askel tai mikroaskel). Näiden pulssien taajuus määrää moottorin nopeuden. Taso (korkea tai matala) DIRECTION-rivillä määrittää pyörimissuunnan. Tämä yksinkertaisuus tekee ohjauksesta a korkean vääntömomentin askelmoottori yksinkertaista mikro-ohjaimille ja PLC:ille.
Johdot ja liitännät on suoritettava oikein luotettavuuden varmistamiseksi ja vaurioiden estämiseksi. Riittävän mittaisten johtojen käyttö on välttämätöntä, jotta moottorin virta voidaan käsitellä ilman liiallista jännitteen pudotusta tai kuumenemista. Liitäntöjen kuljettajaan tulee olla turvallisia, ja on hyvä käytäntö käyttää suojattuja kaapeleita STEP- ja DIRECTION-signaaleille niiden suojaamiseksi sähköiseltä melulta, joka voi aiheuttaa epäsäännöllistä moottorin toimintaa. Ohjaimen, virtalähteen ja moottorin rungon asianmukainen maadoitus on myös kriittistä vakaan toiminnan kannalta.
Jopa oikein valitulla korkean vääntömomentin askelmoottori ja käyttöjärjestelmä, käytön aikana voi ilmetä ongelmia. Yleisten ongelmien perimmäisten syiden ymmärtäminen on välttämätöntä järjestelmän luotettavuuden ja suorituskyvyn ylläpitämiseksi.
Moottorin pysähtyminen on yksi yleisimmistä ongelmista. Se tapahtuu, kun kuorman vaatima vääntömomentti ylittää vääntömomentin, jonka moottori voi tuottaa tietyllä nopeudella. Ensisijainen syy on virheellinen yhteensopivuus moottorin suorituskyvyn ja sovelluksen vaatimusten välillä, jonka usein paljastaa askelmoottorin nopeus vs vääntömomentti käyrä. Pysähtyminen voi johtua myös riittämättömästä sähkönsyötöstä. Alikokoinen virtalähde, joka ei pysty tarjoamaan riittävää jännitettä, aiheuttaa nopean vääntömomentin pudotuksen nopeuden kasvaessa. Samoin moottorin nimellisarvoa pienemmälle virtarajalle asetettu ohjain estää moottoria kehittämästä täyttä vääntömomenttiaan. Ratkaisuja ovat vääntömomenttivaatimuksen uudelleenlaskenta suuremmalla turvamarginaalilla, suuremman momenttikäyrän moottorin valinta, syöttöjännitteen nostaminen kuljettajan rajoissa tai kuljettajan virtalähdön oikea konfigurointi.
Ylikuumeneminen on askelmoottoreiden luonnollinen ominaisuus, koska ne ottavat virtaa myös paikallaan ollessaan. Liiallinen lämpö voi kuitenkin heikentää eristystä ja lyhentää sitä askelmoottorin elinkaari . Yleisin syy on moottorin käyttäminen suurimmalla nimellisvirralla tai lähellä sitä pitkiä aikoja. Liiallisen virran käyttäminen moottorin suunniteltua suuremman momentin saavuttamiseksi tuottaa lämpöä. Muita syitä ovat korkea askelnopeus alhaisilla nopeuksilla, joissa vääntömomentti on korkea, tai riittämätön jäähdytys sovellusympäristössä. Ylikuumenemisen vähentämiseksi varmista, että ohjaimen virta on asetettu oikein – usein moottorin nimellisvirtaan – eikä tarpeettoman korkeaksi. Ilmavirran parantaminen moottorin ympärillä tai jäähdytyselementin lisääminen voi olla tehokasta. Jatkuvassa käytössä olevissa sovelluksissa, jotka vaativat suurta vääntömomenttia, moottorin valitseminen, jonka vääntömomentti on ehdottomasti välttämätöntä, antaa sen käydä viileämmin.
Tärinä ja melu ovat luontaisia askelmoottoreiden diskreetille askeltyypille, mutta niistä voi tulla ongelmallisia tarkkuussovelluksissa. Nämä ongelmat ilmenevät eniten alhaisilla nopeuksilla ja moottorin resonanssitaajuuksilla. Tärinä voi johtaa ennenaikaiseen mekaaniseen kulumiseen ja heikentää paikannustarkkuutta herkissä järjestelmissä. Ensisijainen ratkaisu on käyttää mikroaskelma ohjaimet, jotka tasoittavat liikettä kokonaisten vaiheiden välillä vähentäen merkittävästi tärinää ja ääniä. Mekaanisesti varmistamalla, että moottori on kiinnitetty kunnolla ja kytketty kunnolla kuormaan, voi vaimentaa tärinää. Jos resonanssi tietyillä nopeuksilla on ongelma, ohjausjärjestelmä voidaan ohjelmoida kiihtymään näiden nopeuksien läpi nopeasti sen sijaan, että se toimisi tasaisesti niiden sisällä.
Epätarkka paikannus avoimen silmukan stepperijärjestelmässä ilmaisee melkein aina kadonneita askelia. Tämä tapahtuu, kun moottori ei siirry käskettyyn asentoon, koska kuormitusmomentti ylitti käytettävissä olevan moottorin vääntömomentin. Järjestelmä ei ole tietoinen virheestä, mikä johtaa kasautuvaan paikannusvirheeseen. Perimmäinen syy on usein riittämätön vääntömomentti, kuten pysähtyminen. Se voi kuitenkin johtua myös äkillisistä iskukuormituksista tai liiallisista kiihtyvyyssuhteista, jotka vaativat välitöntä vääntömomenttia, joka ylittää moottorin kyvyn. Epätarkkuuden välttämiseksi moottorin alkuperäinen valinta on tarkistettava vääntömomenttikäyrää vasten. Sovelluksissa, joissa väliin jääneet vaiheet eivät ole hyväksyttäviä, tehokkain ratkaisu on siirtyä a suljetun silmukan korkean vääntömomentin askelmoottori järjestelmä. Tämä järjestelmä käyttää enkooderia valvomaan sijaintia ja korjaa automaattisesti kaikki puuttuvat askeleet, mikä varmistaa stepperin tarkkuuden ja servon luotettavuuden.
Ala korkean vääntömomentin askelmoottoris ei ole staattinen; se kehittyy vastaamaan yhä kehittyneemmän automaation ja tarkkuussuunnittelun vaatimuksiin. Useat keskeiset trendit muokkaavat niiden tulevaa kehitystä.
Edistystä moottorimateriaaleissa ja suunnittelussa johtavat jatkuvaan tehotiheyden paranemiseen. Korkealaatuisten kestomagneettien, kuten neodyymin, ja staattorin ja roottorin ytimien laminointiterästen käyttö antaa valmistajille mahdollisuuden saada enemmän vääntömomenttia tietystä runkokoosta. Tämä suuntaus kohti miniatyrisointia suorituskyvystä tinkimättä mahdollistaa kompaktimpien ja tehokkaampien koneiden suunnittelun. Uusien magneettisten materiaalien ja optimoitujen sähkömagneettisten geometrioiden tutkimus lupaa lisää tehokkuutta ja vääntömomenttia.
Integrointi kehittyneiden ohjausjärjestelmien kanssa on hallitseva suuntaus, jota ohjaa suurelta osin yleistyminen suljettu silmukka teknologiaa. Ero stepper- ja servojärjestelmien välillä hämärtyy askelmoottori kooderilla ratkaisuista tulee kustannustehokkaampia ja laajempia. Tulevat kuljettajat sisältävät kehittyneempiä algoritmeja, jotka eivät vain korjaa sijaintivirheitä, vaan myös vaimentavat aktiivisesti tärinää ja optimoivat virrankulutuksen reaaliajassa kuormituksen perusteella. Tämä älykäs ohjaus maksimoi moottorin vääntömomentti käytettävissä ja parantaa samalla sileyttä ja tehokkuutta.
The energiatehokkaiden ja vääntömomenttimoottoreiden kasvava kysyntä vaikuttaa suunnittelun prioriteetteihin. Kun kestävyydestä tulee keskeinen tekninen huolenaihe, askelmoottoreiden luontaista energiankulutusta pyritään vähentämään, sillä ne käyttävät yleensä täyden virran jopa pysähdyksissä. Uusia ajuritekniikoita on tulossa, jotka voivat dynaamisesti vähentää moottorin virtaa, kun se on täynnä pitämällä vääntömomenttia ei tarvita, mikä vähentää merkittävästi virrankulutusta ja lämmöntuotantoa suorituskyvystä tinkimättä. Tämä on erityisen tärkeää akkukäyttöisissä sovelluksissa ja suurissa teollisuuslaitoksissa, joissa energiakustannukset ovat merkittäviä.
Suuren vääntömomentin askelmoottorit ovat kriittinen mahdollistava teknologia monille nykyaikaisille sovelluksille, jotka vaativat tarkan asennon ohjauksen ja huomattavan mekaanisen voiman yhdistelmän. Alkaen nivelnivelet robotin kädet voimakkaille asemille CNC-reitittimet ja luotettavat toimilaitteet sisään lääketieteelliset laitteet Nämä moottorit tarjoavat ainutlaatuisen ratkaisun, joka tasapainottaa suorituskyvyn, yksinkertaisuuden ja kustannustehokkuuden.
Tehokas valinta ja käyttö a korkean vääntömomentin askelmoottori riippuu sovelluksen vaatimusten perusteellisesta ymmärtämisestä, erityisesti koko käyttönopeusalueella tarvittavasta vääntömomentista. On välttämätöntä harkita huolellisesti sellaisia tekijöitä kuin moottorin koko, sähköiset tiedot ja ympäristöolosuhteet. Lisäksi optimaalisen suorituskyvyn saavuttaminen on mahdotonta ilman moottorin yhdistämistä oikein sovitetun ohjaimen ja virtalähteen kanssa.
1. Johdanto: AC-oikosulkumoottorin hevosvoiman purkaminen AC induktiomoottori on yksi m...
LUE LISÄÄ1. Johdanto Nykyaikaisessa teollisuusautomaatiossa, konesalirakentamisessa, kulutuselektroniikassa...
LUE LISÄÄAskelmoottorit edustavat modernin liikkeenhallinnan kulmakiviä, jotka tarjoavat tarkan paikantamisen ja...
LUE LISÄÄTeollisuusmoottorimaailmassa on käynnissä merkittävä muutos, jota ohjaavat säälimättömät ...
LUE LISÄÄLiittyvät tuotteet
Building 10, No.199, Jinfeng Road, Suzhou High-tech, Jiangsun maakunta, Kiina
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Tekijänoikeus © Suzhou Retek Electric Technology Co., Ltd. Kaikki oikeudet pidätetään. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













